




ឧបករណ៍បញ្ជាលំអៀងស្វ័យប្រវត្តិសម្រាប់ម៉ូឌុល MZM ដែលមានភាពជាក់លាក់ខ្ពស់


លក្ខណៈពិសេស
• ការគ្រប់គ្រងវ៉ុលលំអៀងលើចំណុចកំពូល/សូន្យ/Q+/Q−
• ការគ្រប់គ្រងវ៉ុលលំអៀងលើចំណុចចៃដន្យ
• ការគ្រប់គ្រងដ៏ច្បាស់លាស់បំផុត៖ សមាមាត្រនៃការផុតពូជអតិបរមា 50dB លើរបៀប Null;
ភាពត្រឹមត្រូវ ±0.5◦ លើរបៀប Q+ និង Q−
• ទំហំឌីធើរទាប៖
0.1% Vπ នៅរបៀប NULL និងរបៀប PEAK
2% Vπ នៅរបៀប Q+ និងរបៀប Q−
• ស្ថេរភាពខ្ពស់៖ ជាមួយនឹងការអនុវត្តឌីជីថលពេញលេញ
• ទម្រង់ទាប៖ ៤០មម (ទទឹង) × ៣០មម (ជម្រៅ) × ១០មម (កម្ពស់)
• ងាយស្រួលប្រើ៖ ប្រតិបត្តិការដោយដៃជាមួយឧបករណ៍លោតខ្នាតតូច;
ប្រតិបត្តិការ OEM ដែលអាចបត់បែនបានតាមរយៈ MCU UART2
• របៀបពីរផ្សេងគ្នាដើម្បីផ្តល់វ៉ុលលំអៀង៖ ក. ការគ្រប់គ្រងលំអៀងដោយស្វ័យប្រវត្តិ
ខ. វ៉ុលលំអៀងដែលកំណត់ដោយអ្នកប្រើប្រាស់

ពាក្យសុំ
• LiNbO3 និងឧបករណ៍កែប្រែ MZ ផ្សេងទៀត
• ឌីជីថល NRZ, RZ
• កម្មវិធីជីពចរ
• ប្រព័ន្ធខ្ចាត់ខ្ចាយ Brillouin និងឧបករណ៍ចាប់សញ្ញាអុបទិកផ្សេងទៀត
• ឧបករណ៍បញ្ជូន CATV
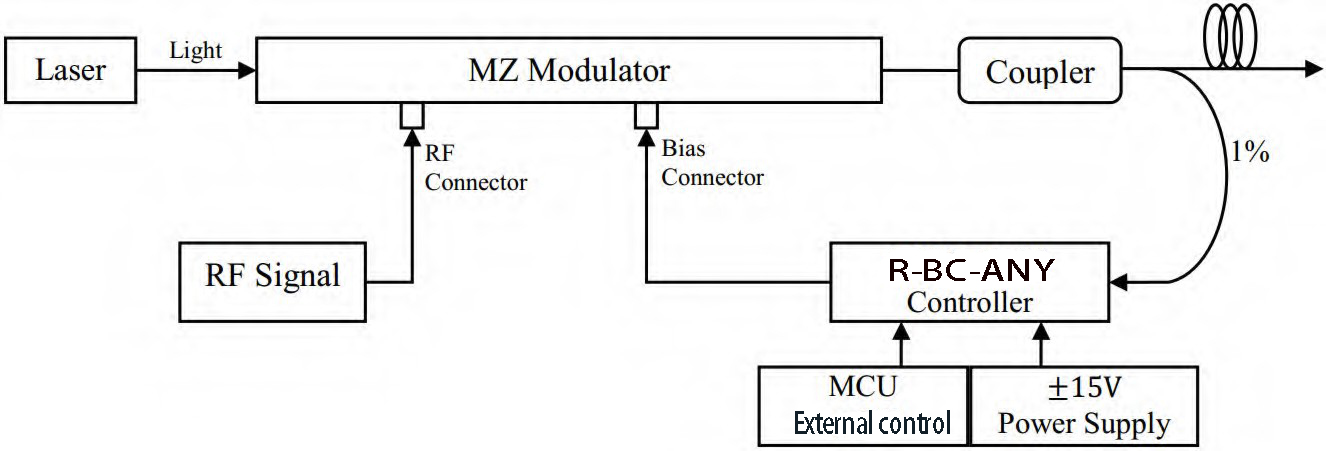
ការអនុវត្ត
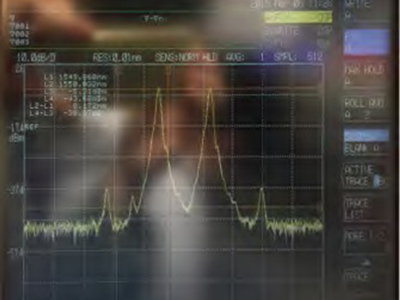
រូបភាពទី 1. ការបង្ក្រាបក្រុមហ៊ុនដឹកជញ្ជូន
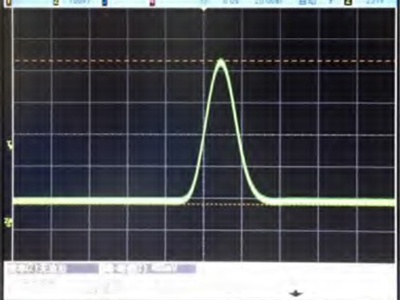
រូបភាពទី 2. ការបង្កើតជីពចរ

រូបភាពទី 3. ថាមពលអតិបរមារបស់ឧបករណ៍កែប្រែ
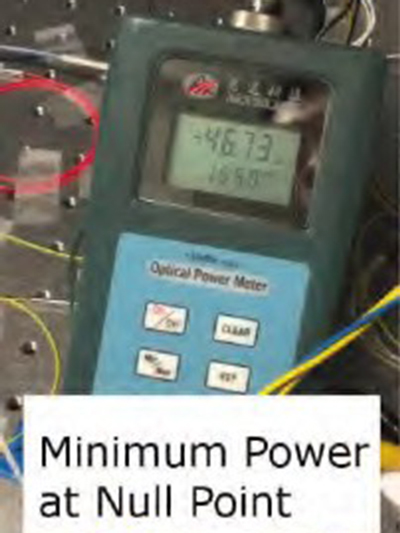
រូបភាពទី 4. ថាមពលអប្បបរមារបស់ឧបករណ៍កែប្រែ
សមាមាត្រផុតពូជ Maxim DC
នៅក្នុងការពិសោធន៍នេះ គ្មានសញ្ញា RF ណាមួយត្រូវបានអនុវត្តទៅប្រព័ន្ធនោះទេ។ ការពន្លត់ចរន្តអគ្គិសនីសុទ្ធត្រូវបានវាស់វែង។
១. រូបភាពទី ៥ បង្ហាញពីថាមពលអុបទិកនៃទិន្នផលរបស់ម៉ូឌុលឌ័រ នៅពេលដែលម៉ូឌុលឌ័រត្រូវបានគ្រប់គ្រងនៅចំណុចកំពូល។ វាបង្ហាញ 3.71dBm នៅក្នុងដ្យាក្រាម។
2. រូបភាពទី 6 បង្ហាញពីថាមពលអុបទិកនៃទិន្នផលរបស់ម៉ូឌុលឌ័រ នៅពេលដែលម៉ូឌុលឌ័រត្រូវបានគ្រប់គ្រងនៅចំណុចសូន្យ។ វាបង្ហាញ -46.73dBm នៅក្នុងដ្យាក្រាម។ នៅក្នុងការពិសោធន៍ពិតប្រាកដ តម្លៃប្រែប្រួលប្រហែល -47dBm; ហើយ -46.73 គឺជាតម្លៃដែលមានស្ថេរភាព។
៣. ដូច្នេះ សមាមាត្រនៃការផុតពូជចរន្តตรงដែលមានស្ថេរភាពដែលវាស់បានគឺ 50.4dB។
តម្រូវការសម្រាប់អត្រាផុតពូជខ្ពស់
១. ឧបករណ៍កែប្រែប្រព័ន្ធត្រូវតែមានអត្រាផុតពូជខ្ពស់។ លក្ខណៈរបស់ឧបករណ៍កែប្រែប្រព័ន្ធសម្រេចថាអត្រាផុតពូជអតិបរមាអាចសម្រេចបាន។
2. ប៉ូឡារីសេសិននៃពន្លឺបញ្ចូលរបស់ម៉ូឌុលឌ័រត្រូវតែត្រូវបានយកចិត្តទុកដាក់។ ម៉ូឌុលឌ័រមានភាពរសើបចំពោះប៉ូឡារីសេសិន។ ប៉ូឡារីសេសិនត្រឹមត្រូវអាចធ្វើអោយប្រសើរឡើងនូវអត្រាផុតពូជលើសពី 10dB។ នៅក្នុងការពិសោធន៍មន្ទីរពិសោធន៍ ជាធម្មតាត្រូវការឧបករណ៍បញ្ជាប៉ូឡារីសេសិន។
៣. ឧបករណ៍បញ្ជាលំអៀងត្រឹមត្រូវ។ នៅក្នុងការពិសោធន៍សមាមាត្រផុតពូជ DC របស់យើង សមាមាត្រផុតពូជ 50.4dB ត្រូវបានសម្រេច។ ខណៈពេលដែលសន្លឹកទិន្នន័យរបស់ក្រុមហ៊ុនផលិតឧបករណ៍កែប្រែបង្ហាញត្រឹមតែ 40dB ប៉ុណ្ណោះ។ មូលហេតុនៃការកែលម្អនេះគឺថា ឧបករណ៍កែប្រែមួយចំនួនរសាត់យ៉ាងលឿន។ ឧបករណ៍បញ្ជាលំអៀង Rofea R-BC-ANY ធ្វើបច្ចុប្បន្នភាពវ៉ុលលំអៀងរៀងរាល់ 1 វិនាទីម្តង ដើម្បីធានាបាននូវការឆ្លើយតបលឿន។
លក្ខណៈបច្ចេកទេស
| ប៉ារ៉ាម៉ែត្រ | នាទី | ប្រភេទ | អតិបរមា | ឯកតា | លក្ខខណ្ឌ |
| ប្រសិទ្ធភាពនៃការគ្រប់គ្រង | |||||
| សមាមាត្រនៃការផុតពូជ | MER 1 | 50 | dB | ||
| CSO2 | -៥៥ | -៦៥ | -៧០ | ដេស៊ីប៊ីក | ទំហំឌីធើរ៖ 2%Vπ |
| ពេលវេលាស្ថេរភាព | 4 | s | ចំណុចតាមដាន៖ សូន្យ និង កំពូល | ||
| 10 | ចំណុចតាមដាន៖ Q+ និង Q- | ||||
| អគ្គិសនី | |||||
| វ៉ុលថាមពលវិជ្ជមាន | +១៤.៥ | +១៥ | +១៥.៥ | V | |
| ចរន្តថាមពលវិជ្ជមាន | 20 | 30 | mA | ||
| វ៉ុលថាមពលអវិជ្ជមាន | -១៥.៥ | -១៥ | -១៤.៥ | V | |
| ចរន្តថាមពលអវិជ្ជមាន | 2 | 4 | mA | ||
| ជួរវ៉ុលទិន្នផល | -៩.៥៧ | +៩,៨៥ | V | ||
| ភាពជាក់លាក់នៃវ៉ុលទិន្នផល | ៣៤៦ | µV | |||
| ប្រេកង់ឌីធើរ | ៩៩៩.៩៥ | ១០០០ | ១០០០.០៥ | Hz | កំណែ៖ សញ្ញាឌីធើរ 1kHz |
| អំព្លីទីតឌីធើរ | ០.១% វ៉ុលπ | V | ចំណុចតាមដាន៖ សូន្យ និង កំពូល | ||
| ២% វ៉ុលπ | ចំណុចតាមដាន៖ Q+ និង Q- | ||||
| អុបទិក | |||||
| ថាមពលអុបទិកបញ្ចូល 3 | -៣០ | -5 | ឌីប៊ីម | ||
| រលកធាតុចូល | ៧៨០ | ឆ្នាំ២០០០ | nm | ||
១. MER សំដៅលើ Modulator Extinction Ratio។ អត្រាផុតពូជដែលសម្រេចបានជាធម្មតាគឺជាអត្រាផុតពូជរបស់ Modulator ដែលបានបញ្ជាក់នៅក្នុងសន្លឹកទិន្នន័យ Modulator។
2. CSO សំដៅលើលំដាប់ទីពីរផ្សំ។ ដើម្បីវាស់ CSO បានត្រឹមត្រូវ គុណភាពលីនេអ៊ែរនៃសញ្ញា RF ឧបករណ៍កែប្រែ និងឧបករណ៍ទទួលត្រូវតែធានា។ លើសពីនេះ ការអាន CSO របស់ប្រព័ន្ធអាចប្រែប្រួលនៅពេលដំណើរការនៅប្រេកង់ RF ផ្សេងៗគ្នា។
៣. សូមចំណាំថា ថាមពលអុបទិកបញ្ចូលមិនត្រូវគ្នានឹងថាមពលអុបទិកនៅចំណុចប៊ីអាសដែលបានជ្រើសរើសទេ។ វាសំដៅទៅលើថាមពលអុបទិកអតិបរមាដែលឧបករណ៍កែប្រែអាចនាំចេញទៅឧបករណ៍បញ្ជា នៅពេលដែលវ៉ុលប៊ីអាសមានចាប់ពី −Vπ ដល់ +Vπ។
ចំណុចប្រទាក់អ្នកប្រើប្រាស់
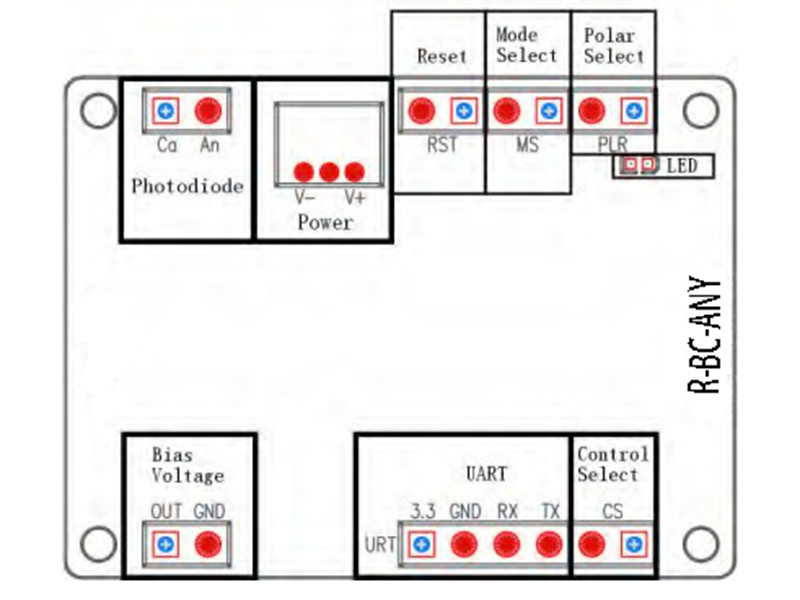
រូបភាពទី 5. ការផ្គុំ
| ក្រុម | ប្រតិបត្តិការ | ការពន្យល់ |
| ហ្វូតូឌីយ៉ូត 1 | PD: ភ្ជាប់កាតូតរបស់ហ្វូតូឌីយ៉ូត MZM | ផ្តល់មតិប្រតិកម្មរូបថតបច្ចុប្បន្ន |
| GND: ភ្ជាប់អាណូតរបស់ photodiode MZM | ||
| ថាមពល | ប្រភពថាមពលសម្រាប់ឧបករណ៍បញ្ជាលំអៀង | V-: ភ្ជាប់អេឡិចត្រូតអវិជ្ជមាន |
| V+: ភ្ជាប់អេឡិចត្រូតវិជ្ជមាន | ||
| ស្នប់កណ្តាល៖ ភ្ជាប់អេឡិចត្រូតដី | ||
| កំណត់ឡើងវិញ | បញ្ចូលខ្សែភ្ជាប់ ហើយទាញចេញបន្ទាប់ពី 1 វិនាទី | កំណត់ឧបករណ៍បញ្ជាឡើងវិញ |
| ជ្រើសរើសរបៀប | បញ្ចូល ឬទាញឧបករណ៍លោតចេញ | គ្មានឧបករណ៍លោត៖ របៀបសូន្យ; ជាមួយឧបករណ៍លោត៖ របៀប Quad |
| ប៉ូឡា សេល ២ | បញ្ចូល ឬទាញឧបករណ៍លោតចេញ | គ្មានឧបករណ៍លោត៖ ប៉ូលវិជ្ជមាន; ជាមួយឧបករណ៍លោត៖ ប៉ូលអវិជ្ជមាន |
| វ៉ុលលំអៀង | ភ្ជាប់ជាមួយច្រកវ៉ុលលំអៀង MZM | OUT និង GND ផ្តល់វ៉ុលលំអៀងសម្រាប់ម៉ូឌុល |
| អំពូល LED | បើកជាប់ជានិច្ច | ធ្វើការក្រោមស្ថានភាពស្ថិរភាព |
| បើក-បិទ ឬ បិទ-បើក រៀងរាល់ 0.2 វិនាទីម្តង | ដំណើរការទិន្នន័យ និងស្វែងរកចំណុចត្រួតពិនិត្យ | |
| បើក-បិទ ឬ បិទ-បើក រៀងរាល់ 1 វិនាទីម្តង | ថាមពលអុបទិកបញ្ចូលខ្សោយពេក | |
| បើក-បិទ ឬ បិទ-បើក រៀងរាល់ 3 វិនាទីម្តង | ថាមពលអុបទិកបញ្ចូលខ្លាំងពេក | |
| យូអេសធី | ដំណើរការឧបករណ៍បញ្ជាតាមរយៈ UART | ៣.៣: វ៉ុលយោង ៣.៣ វ៉ុល |
| GND: ដី | ||
| RX: ទទួលឧបករណ៍បញ្ជា | ||
| TX: ការបញ្ជូនរបស់ឧបករណ៍បញ្ជា | ||
| ការជ្រើសរើសការគ្រប់គ្រង | បញ្ចូល ឬទាញឧបករណ៍លោតចេញ | គ្មាន jumper: ការគ្រប់គ្រង jumper; ជាមួយ jumper: ការគ្រប់គ្រង UART |
១. ឧបករណ៍កែប្រែពន្លឺ MZ មួយចំនួនមានហ្វូតូឌីយ៉ូដខាងក្នុង។ ការដំឡើងឧបករណ៍បញ្ជាគួរតែត្រូវបានជ្រើសរើសរវាងការប្រើប្រាស់ហ្វូតូឌីយ៉ូដរបស់ឧបករណ៍បញ្ជា ឬការប្រើប្រាស់ហ្វូតូឌីយ៉ូដខាងក្នុងរបស់ឧបករណ៍បញ្ជា។ វាត្រូវបានណែនាំឱ្យប្រើហ្វូតូឌីយ៉ូដរបស់ឧបករណ៍បញ្ជាសម្រាប់ការពិសោធន៍មន្ទីរពិសោធន៍ដោយសារហេតុផលពីរយ៉ាង។ ទីមួយ ហ្វូតូឌីយ៉ូដរបស់ឧបករណ៍បញ្ជាបានធានាគុណភាព។ ទីពីរ វាកាន់តែងាយស្រួលក្នុងការកែតម្រូវអាំងតង់ស៊ីតេពន្លឺបញ្ចូល។ ចំណាំ៖ ប្រសិនបើប្រើហ្វូតូឌីយ៉ូដខាងក្នុងរបស់ឧបករណ៍បញ្ជា សូមប្រាកដថាចរន្តទិន្នផលរបស់ហ្វូតូឌីយ៉ូដគឺសមាមាត្រយ៉ាងតឹងរ៉ឹងទៅនឹងថាមពលបញ្ចូល។
2. ម្ជុលប៉ូលត្រូវបានប្រើដើម្បីប្តូរចំណុចបញ្ជារវាងចំណុចកំពូល និងចំណុចសូន្យនៅក្នុងរបៀបបញ្ជាចំណុចសូន្យ (កំណត់ដោយម្ជុលជ្រើសរើសរបៀប) ឬ Quad+
និងរបៀបត្រួតពិនិត្យ Quad-in Quad។ ប្រសិនបើ jumper នៃ polar pin មិនត្រូវបានបញ្ចូលទេ ចំណុចត្រួតពិនិត្យនឹងជា Null ក្នុងរបៀប Null ឬ Quad+ ក្នុងរបៀប Quad។ ទំហំនៃប្រព័ន្ធ RF ក៏នឹងប៉ះពាល់ដល់ចំណុចត្រួតពិនិត្យផងដែរ។ នៅពេលដែលមិនមានសញ្ញា RF ឬទំហំសញ្ញា RF មានទំហំតូច ឧបករណ៍បញ្ជាអាចចាក់សោចំណុចការងារទៅចំណុចកែតម្រូវដូចដែលបានជ្រើសរើសដោយ MS និង PLR jumper។ នៅពេលដែលទំហំសញ្ញា RF លើសពីកម្រិតជាក់លាក់ ប៉ូលនៃប្រព័ន្ធនឹងត្រូវបានផ្លាស់ប្តូរ ក្នុងករណីនេះ ក្បាល PLR គួរតែស្ថិតនៅក្នុងស្ថានភាពផ្ទុយ ពោលគឺ jumper គួរតែត្រូវបានបញ្ចូលប្រសិនបើវាមិនត្រូវបានបញ្ចូល ឬទាញចេញប្រសិនបើវាត្រូវបានបញ្ចូល។
កម្មវិធីធម្មតា
ឧបករណ៍បញ្ជាងាយស្រួលប្រើ។
ជំហានទី 1. ភ្ជាប់រន្ធ 1% នៃឧបករណ៍ភ្ជាប់ទៅនឹងហ្វូតូឌីយ៉ូតរបស់ឧបករណ៍បញ្ជា។
ជំហានទី 2. ភ្ជាប់វ៉ុលប៊ីអាសចេញពីឧបករណ៍បញ្ជា (តាមរយៈ SMA ឬឧបករណ៍ភ្ជាប់ 2-pin ទំហំ 2.54mm) ទៅកាន់ច្រកប៊ីអាសរបស់ឧបករណ៍កែប្រែ។
ជំហានទី 3. ផ្តល់ឧបករណ៍បញ្ជាជាមួយនឹងវ៉ុល DC +15V និង -15V។
ជំហានទី 4. កំណត់ឧបករណ៍បញ្ជាឡើងវិញ ហើយវានឹងចាប់ផ្តើមដំណើរការ។
ចំណាំ៖ សូមធ្វើឱ្យប្រាកដថាសញ្ញា RF នៃប្រព័ន្ធទាំងមូលត្រូវបានបើកមុនពេលកំណត់ឧបករណ៍បញ្ជាឡើងវិញ។
ក្រុមហ៊ុន Rofea Optoelectronics ផ្តល់ជូននូវផលិតផលពាណិជ្ជកម្មជាច្រើនប្រភេទ ដូចជា ឧបករណ៍កែប្រែអេឡិចត្រូអុបទិក ឧបករណ៍កែប្រែដំណាក់កាល ឧបករណ៍កែប្រែអាំងតង់ស៊ីតេ ឧបករណ៍ចាប់ពន្លឺ ប្រភពពន្លឺឡាស៊ែរ ឡាស៊ែរ DFB ឧបករណ៍ពង្រីកពន្លឺអុបទិក EDFA ឡាស៊ែរ SLD ឧបករណ៍កែប្រែ QPSK ឡាស៊ែរជីពចរ ឧបករណ៍ចាប់ពន្លឺ ឧបករណ៍ចាប់ពន្លឺដែលមានតុល្យភាព ឧបករណ៍បញ្ជាឡាស៊ែរ ឧបករណ៍ពង្រីកពន្លឺសរសៃអុបទិក ម៉ែត្រថាមពលអុបទិក ឡាស៊ែរប្រ៊ដប៊ែន ឡាស៊ែរដែលអាចលៃតម្រូវបាន ឧបករណ៍ចាប់ពន្លឺអុបទិក ឧបករណ៍បញ្ជាឌីយ៉ូដឡាស៊ែរ ឧបករណ៍ពង្រីកពន្លឺសរសៃ។ យើងក៏ផ្តល់ជូននូវឧបករណ៍កែប្រែជាក់លាក់ជាច្រើនសម្រាប់ការប្ដូរតាមបំណងផងដែរ ដូចជា ឧបករណ៍កែប្រែដំណាក់កាលអារេ 1*4 Vpi ទាបបំផុត និងឧបករណ៍កែប្រែសមាមាត្រផុតពូជខ្ពស់បំផុត ដែលភាគច្រើនប្រើប្រាស់នៅក្នុងសាកលវិទ្យាល័យ និងវិទ្យាស្ថាន។
សង្ឃឹមថាផលិតផលរបស់យើងនឹងមានប្រយោជន៍ដល់អ្នក និងការស្រាវជ្រាវរបស់អ្នក។


