




ឧបករណ៍បញ្ជាលំអៀងម៉ូឌុល IQ តូចបំផុត ឧបករណ៍បញ្ជាលំអៀងស្វ័យប្រវត្តិ


លក្ខណៈពិសេស
•ផ្តល់នូវភាពលំអៀងបីសម្រាប់ម៉ូឌុល IQ ទម្រង់ម៉ូឌុលឯករាជ្យ៖
•បានផ្ទៀងផ្ទាត់ QPSK, QAM, OFDM, SSB
•ដោត និងលេង៖
មិនចាំបាច់ក្រិតតាមខ្នាតដោយដៃទេ អ្វីៗគ្រប់យ៉ាងដោយស្វ័យប្រវត្តិ
•ដៃ I, Q៖ គ្រប់គ្រងលើរបៀបកំពូល និងសូន្យ អត្រាផុតពូជខ្ពស់៖ អតិបរមា 50dB1
•ដៃ P៖ គ្រប់គ្រងលើរបៀប Q+ និង Q- ភាពត្រឹមត្រូវ៖ ± 2◦
•ទម្រង់ទាប៖ ៤០មម (ទទឹង) × ២៨មម (ជម្រៅ) × ៨មម (កម្ពស់)
•ស្ថេរភាពខ្ពស់៖ ការអនុវត្តឌីជីថលពេញលេញ ងាយស្រួលប្រើ៖
•ប្រតិបត្តិការដោយដៃជាមួយ mini jumper ប្រតិបត្តិការ OEM ដែលអាចបត់បែនបានតាមរយៈ UART2
•របៀបពីរដើម្បីផ្តល់វ៉ុលលំអៀង៖ ក. ការគ្រប់គ្រងលំអៀងដោយស្វ័យប្រវត្តិ ខ. វ៉ុលលំអៀងដែលកំណត់ដោយអ្នកប្រើប្រាស់
ពាក្យសុំ
•LiNbO3 និង IQ modulators ផ្សេងទៀត
•QPSK, QAM, OFDM, SSB និងផ្សេងៗទៀត
•ការបញ្ជូនដែលស៊ីសង្វាក់គ្នា
ការអនុវត្ត
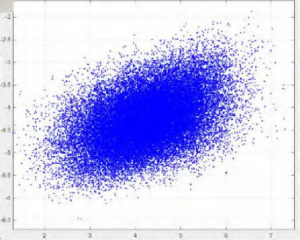
រូបភាពទី 1. ក្រុមតារានិករ (គ្មានឧបករណ៍បញ្ជា)
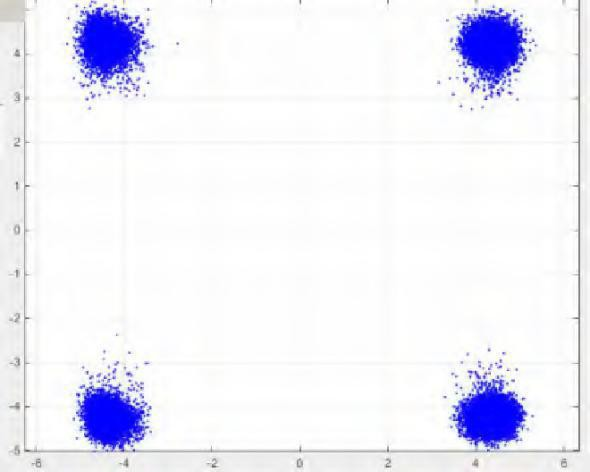
រូបភាពទី 2. QPSK Constellation (ជាមួយឧបករណ៍បញ្ជា)
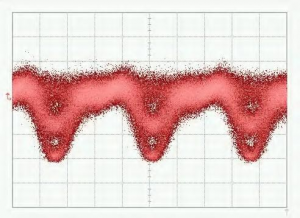
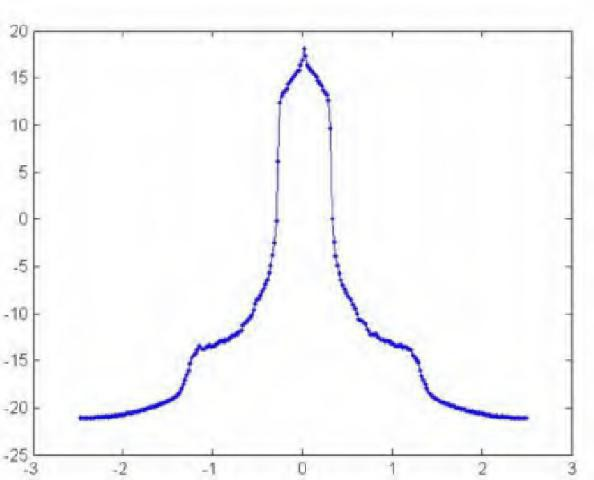
រូបភាពទី 3. លំនាំភ្នែក QPSK
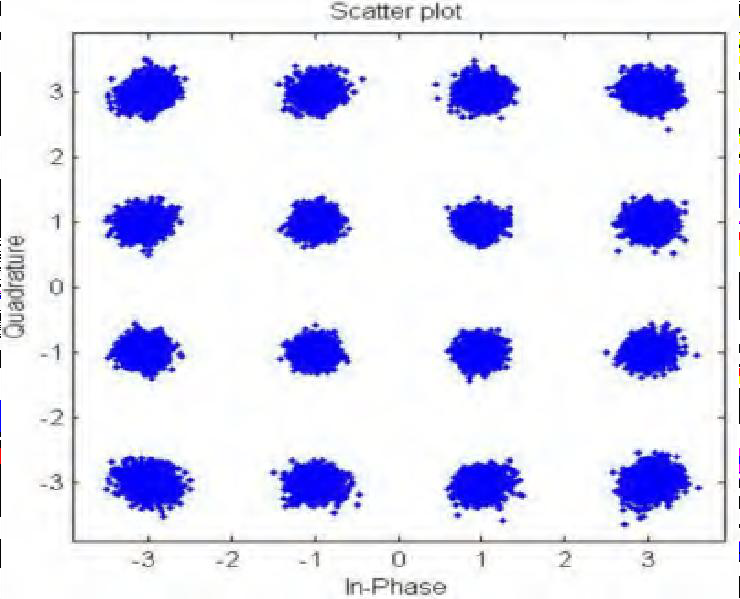
រូបភាពទី 5. លំនាំក្រុមតារានិករ 16-QAM
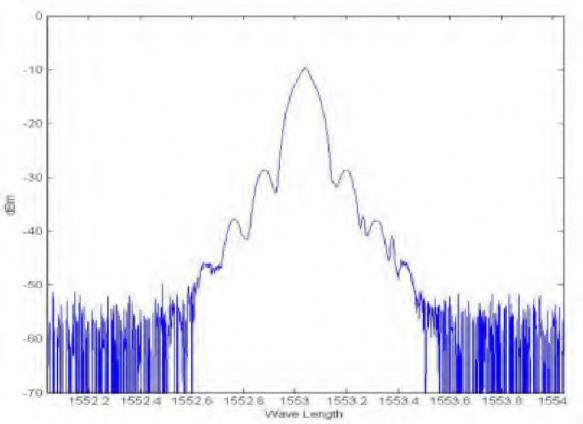
រូបភាពទី 4. វិសាលគម QPSK
រូបភាពទី 6. វិសាលគម 16-QAM
លក្ខណៈបច្ចេកទេស
| ប៉ារ៉ាម៉ែត្រ | នាទី | ប្រភេទ | អតិបរមា | ឯកតា |
| ប្រសិទ្ធភាពត្រួតពិនិត្យ | ||||
| ដៃ I, Q ត្រូវបានគ្រប់គ្រងនៅលើសូន្យ (អប្បបរមា) ឬកំពូល (អតិបរមា) ចំណុច | ||||
| សមាមាត្រនៃការផុតពូជ | MER1 | 50 | dB | |
| ដៃ P ត្រូវបានគ្រប់គ្រងនៅលើQ+(ស្តាំ ការ៉េ) ឬសំណួរ-( ឆ្វេង ការ៉េ) ចំណុច | ||||
| ភាពត្រឹមត្រូវនៅ Quad | −2 | +2 | សញ្ញាបត្រ2 | |
| ពេលវេលាស្ថេរភាព | 15 | 20 | 25 | s |
| អគ្គិសនី | ||||
| វ៉ុលថាមពលវិជ្ជមាន | +១៤.៥ | +១៥ | +១៥.៥ | V |
| ចរន្តថាមពលវិជ្ជមាន | 20 | 30 | mA | |
| វ៉ុលថាមពលអវិជ្ជមាន | -១៥.៥ | -១៥ | -១៤.៥ | V |
| ចរន្តថាមពលអវិជ្ជមាន | 8 | 15 | mA | |
| ជួរវ៉ុលទិន្នផល | -១៤.៥ | +១៤.៥ | V | |
| អំព្លីទីតឌីធើរ | 1%Vπ | V | ||
| អុបទិក | ||||
| ថាមពលអុបទិកបញ្ចូល3 | -៣០ | -8 | ឌីប៊ីម | |
| រលកធាតុចូល | ១១០០ | ១៦៥០ | nm | |
១. MER សំដៅលើ Modulator Extinction Ratio។ អត្រាផុតពូជដែលសម្រេចបានជាធម្មតាគឺជាអត្រាផុតពូជរបស់ Modulator ដែលបានបញ្ជាក់នៅក្នុងសន្លឹកទិន្នន័យ Modulator។
2. សូមចំណាំថា ថាមពលអុបទិកបញ្ចូលមិនត្រូវគ្នានឹងថាមពលអុបទិកនៅចំណុចប៊ីអាសដែលបានជ្រើសរើសទេ។ វាសំដៅទៅលើថាមពលអុបទិកអតិបរមាដែលឧបករណ៍កែប្រែអាចនាំចេញទៅឧបករណ៍បញ្ជា នៅពេលដែលវ៉ុលប៊ីអាសមានចាប់ពី −Vπ ដល់ +Vπ។
ចំណុចប្រទាក់អ្នកប្រើប្រាស់
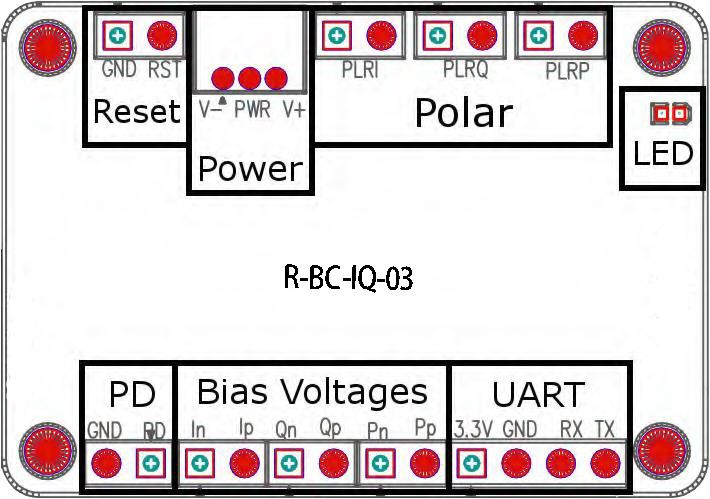
រូបភាពទី 5. ការផ្គុំ
| ក្រុម | ប្រតិបត្តិការ | ការពន្យល់ |
| កំណត់ឡើងវិញ | បញ្ចូលខ្សែភ្ជាប់ ហើយទាញចេញបន្ទាប់ពី 1 វិនាទី | កំណត់ឧបករណ៍បញ្ជាឡើងវិញ |
| ថាមពល | ប្រភពថាមពលសម្រាប់ឧបករណ៍បញ្ជាលំអៀង | វី- ភ្ជាប់អេឡិចត្រូតអវិជ្ជមាននៃការផ្គត់ផ្គង់ថាមពល |
| V+ ភ្ជាប់អេឡិចត្រូតវិជ្ជមាននៃការផ្គត់ផ្គង់ថាមពល | ||
| ច្រកកណ្តាលភ្ជាប់ជាមួយអេឡិចត្រូតដី | ||
| ប៉ូល1 | PLRI: បញ្ចូល ឬទាញឧបករណ៍លោតចេញ | គ្មានឧបករណ៍លោត៖ របៀបសូន្យ; ជាមួយឧបករណ៍លោត៖ របៀបកំពូល |
| PLRQ: បញ្ចូល ឬទាញឧបករណ៍ភ្ជាប់ចេញ | គ្មានឧបករណ៍លោត៖ របៀបសូន្យ; ជាមួយឧបករណ៍លោត៖ របៀបកំពូល | |
| PLRP: បញ្ចូល ឬទាញឧបករណ៍ភ្ជាប់ចេញ | គ្មានឧបករណ៍លោត៖ របៀប Q+; ជាមួយឧបករណ៍លោត៖ របៀប Q- | |
| អំពូល LED | បើកជានិច្ច | ធ្វើការក្រោមស្ថានភាពស្ថិរភាព |
| បើក-បិទ ឬ បិទ-បើក រៀងរាល់ 0.2 វិនាទីម្តង | ដំណើរការទិន្នន័យ និងស្វែងរកចំណុចត្រួតពិនិត្យ | |
| បើក-បិទ ឬ បិទ-បើក រៀងរាល់ 1 វិនាទីម្តង | ថាមពលអុបទិកបញ្ចូលខ្សោយពេក | |
| បើក-បិទ ឬ បិទ-បើក រៀងរាល់ 3 វិនាទីម្តង | ថាមពលអុបទិកបញ្ចូលខ្លាំងពេក | |
| PD2 | ភ្ជាប់ជាមួយ photodiode | រន្ធ PD ភ្ជាប់កាតូតនៃហ្វូតូឌីយ៉ូត |
| ច្រក GND ភ្ជាប់អាណូតនៃហ្វូតូឌីយ៉ូត | ||
| វ៉ុលលំអៀង | ក្នុង, Ip: វ៉ុលលំអៀងសម្រាប់ដៃ I | Ip: ផ្នែកវិជ្ជមាន; ចូល: ផ្នែកអវិជ្ជមាន ឬដី |
| Qn, Qp: វ៉ុលលំអៀងសម្រាប់ដៃ Q | Qp: ផ្នែកវិជ្ជមាន; Qn: ផ្នែកអវិជ្ជមាន ឬដី | |
| Pn, Pp: វ៉ុលលំអៀងសម្រាប់ដៃ P | Pp: ផ្នែកវិជ្ជមាន; Pn: ផ្នែកអវិជ្ជមាន ឬដី | |
| យូអេសធី | ដំណើរការឧបករណ៍បញ្ជាតាមរយៈ UART | ៣.៣: វ៉ុលយោង ៣.៣ វ៉ុល |
| GND: ដី | ||
| RX: ទទួលឧបករណ៍បញ្ជា | ||
| TX: ការបញ្ជូនរបស់ឧបករណ៍បញ្ជា |
1 ប៉ូលអាស្រ័យលើសញ្ញា RF របស់ប្រព័ន្ធ។ នៅពេលដែលមិនមានសញ្ញា RF នៅក្នុងប្រព័ន្ធ ប៉ូលគួរតែវិជ្ជមាន។ នៅពេលដែលសញ្ញា RF មានទំហំធំជាងកម្រិតជាក់លាក់មួយ ប៉ូលនឹងផ្លាស់ប្តូរពីវិជ្ជមានទៅជាអវិជ្ជមាន។ នៅពេលនេះ ចំណុចសូន្យ និងចំណុចកំពូលនឹងប្តូរជាមួយគ្នា។ ចំណុច Q+ និងចំណុច Q- នឹងប្តូរជាមួយគ្នាផងដែរ។ កុងតាក់ប៉ូលអនុញ្ញាតឱ្យអ្នកប្រើប្រាស់ផ្លាស់ប្តូរប៉ូល។
ដោយផ្ទាល់ដោយមិនផ្លាស់ប្តូរចំណុចប្រតិបត្តិការ។
2មានតែជម្រើសមួយប៉ុណ្ណោះដែលត្រូវជ្រើសរើសរវាងការប្រើប្រាស់ហ្វូតូឌីយ៉ូដឧបករណ៍បញ្ជា ឬការប្រើប្រាស់ហ្វូតូឌីយ៉ូដម៉ូឌុល។ វាត្រូវបានណែនាំអោយប្រើហ្វូតូឌីយ៉ូដឧបករណ៍បញ្ជាសម្រាប់ការពិសោធន៍មន្ទីរពិសោធន៍ដោយសារហេតុផលពីរយ៉ាង។ ទីមួយ ហ្វូតូឌីយ៉ូដឧបករណ៍បញ្ជាបានធានានូវគុណភាព។ ទីពីរ វាកាន់តែងាយស្រួលក្នុងការកែតម្រូវអាំងតង់ស៊ីតេពន្លឺបញ្ចូល។ ប្រសិនបើប្រើហ្វូតូឌីយ៉ូដខាងក្នុងរបស់ម៉ូឌុល សូមប្រាកដថាចរន្តទិន្នផលរបស់ហ្វូតូឌីយ៉ូដគឺសមាមាត្រយ៉ាងតឹងរ៉ឹងទៅនឹងថាមពលបញ្ចូល។
ក្រុមហ៊ុន Rofea Optoelectronics ផ្តល់ជូននូវផលិតផលពាណិជ្ជកម្មជាច្រើនប្រភេទ ដូចជា ឧបករណ៍កែប្រែអេឡិចត្រូអុបទិក ឧបករណ៍កែប្រែដំណាក់កាល ឧបករណ៍កែប្រែអាំងតង់ស៊ីតេ ឧបករណ៍ចាប់ពន្លឺ ប្រភពពន្លឺឡាស៊ែរ ឡាស៊ែរ DFB ឧបករណ៍ពង្រីកពន្លឺអុបទិក EDFA ឡាស៊ែរ SLD ឧបករណ៍កែប្រែ QPSK ឡាស៊ែរជីពចរ ឧបករណ៍ចាប់ពន្លឺ ឧបករណ៍ចាប់ពន្លឺដែលមានតុល្យភាព ឧបករណ៍បញ្ជាឡាស៊ែរ ឧបករណ៍ពង្រីកពន្លឺសរសៃអុបទិក ម៉ែត្រថាមពលអុបទិក ឡាស៊ែរប្រ៊ដប៊ែន ឡាស៊ែរដែលអាចលៃតម្រូវបាន ឧបករណ៍ចាប់ពន្លឺអុបទិក ឧបករណ៍បញ្ជាឌីយ៉ូដឡាស៊ែរ ឧបករណ៍ពង្រីកពន្លឺសរសៃ។ យើងក៏ផ្តល់ជូននូវឧបករណ៍កែប្រែជាក់លាក់ជាច្រើនសម្រាប់ការប្ដូរតាមបំណងផងដែរ ដូចជា ឧបករណ៍កែប្រែដំណាក់កាលអារេ 1*4 Vpi ទាបបំផុត និងឧបករណ៍កែប្រែសមាមាត្រផុតពូជខ្ពស់បំផុត ដែលភាគច្រើនប្រើប្រាស់នៅក្នុងសាកលវិទ្យាល័យ និងវិទ្យាស្ថាន។
សង្ឃឹមថាផលិតផលរបស់យើងនឹងមានប្រយោជន៍ដល់អ្នក និងការស្រាវជ្រាវរបស់អ្នក។


