




ឧបករណ៍បញ្ជាលំអៀងម៉ូឌុល DP-IQ តូចបំផុត ឧបករណ៍បញ្ជាលំអៀងស្វ័យប្រវត្តិ


លក្ខណៈពិសេស
•ក្នុងពេលដំណាលគ្នាផ្តល់វ៉ុលលំអៀងស្វ័យប្រវត្តិចំនួនប្រាំមួយសម្រាប់ម៉ូឌុល IQ ប៉ូលារីសពីរ
•ទម្រង់ម៉ូឌុលឯករាជ្យ៖
បានផ្ទៀងផ្ទាត់ SSB, QPSK, QAM, OFDM។
•ដោត និងលេង៖
មិនចាំបាច់ក្រិតតាមខ្នាតដោយដៃទេ អ្វីៗគ្រប់យ៉ាងដោយស្វ័យប្រវត្តិ
•ដៃ I, Q៖ គ្រប់គ្រងលើរបៀបកំពូល និងសូន្យ អត្រាផុតពូជខ្ពស់៖ អតិបរមា 50dB1
•ដៃ P៖ គ្រប់គ្រងលើរបៀប Q+ និង Q- ភាពត្រឹមត្រូវ៖ ± 2◦
•ទម្រង់ទាប៖ ៤០មម (ទទឹង) × ២៩មម (ជម្រៅ) × ៨មម (កម្ពស់)
•ស្ថេរភាពខ្ពស់៖ ការអនុវត្តឌីជីថលពេញលេញ ងាយស្រួលប្រើ៖
•ប្រតិបត្តិការដោយដៃជាមួយ mini jumper 2
ប្រតិបត្តិការ OEM ដែលអាចបត់បែនបានតាមរយៈ UART /IO
•របៀបពីរដើម្បីផ្តល់វ៉ុលលំអៀង៖ ក. ការគ្រប់គ្រងលំអៀងដោយស្វ័យប្រវត្តិ ខ. វ៉ុលលំអៀងដែលកំណត់ដោយអ្នកប្រើប្រាស់

ពាក្យសុំ
•LiNbO3 និងឧបករណ៍កែប្រែ DP-IQ ផ្សេងទៀត
•ការបញ្ជូនដែលស៊ីសង្វាក់គ្នា
1អត្រាផុតពូជខ្ពស់បំផុតអាស្រ័យលើ និងមិនអាចលើសពី 1 អត្រាផុតពូជអតិបរមារបស់ម៉ូឌុលប្រព័ន្ធឡើយ។
2ប្រតិបត្តិការ UART អាចប្រើបានតែលើឧបករណ៍បញ្ជាមួយចំនួនប៉ុណ្ណោះ។
ការអនុវត្ត
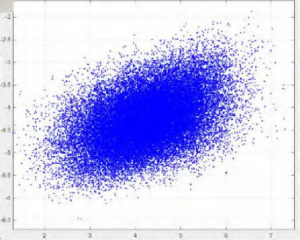
រូបភាពទី 1. ក្រុមតារានិករ (គ្មានឧបករណ៍បញ្ជា)
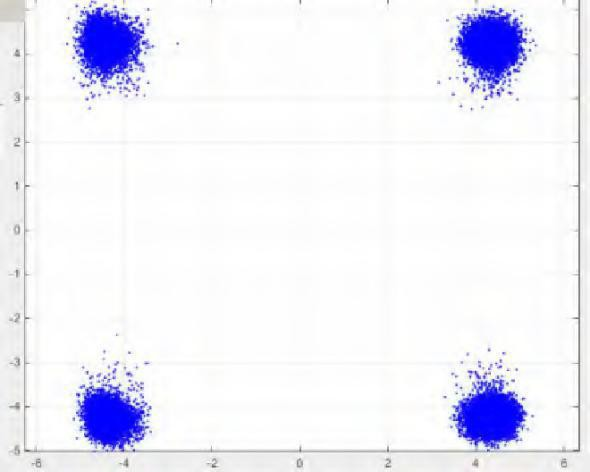
រូបភាពទី 2. QPSK Constellation (ជាមួយឧបករណ៍បញ្ជា)
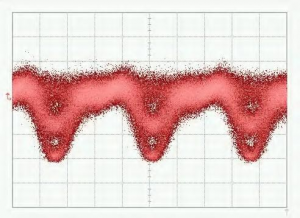
រូបភាពទី 3. លំនាំភ្នែក QPSK
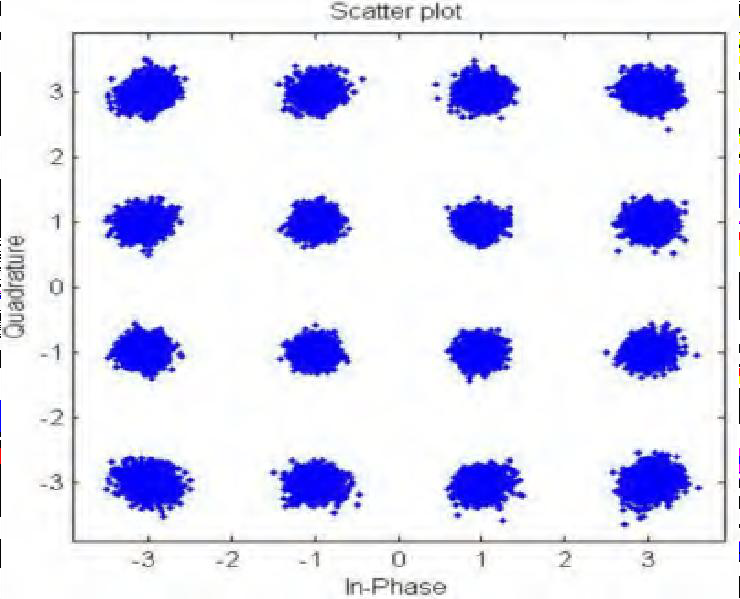
រូបភាពទី 5. លំនាំក្រុមតារានិករ 16-QAM
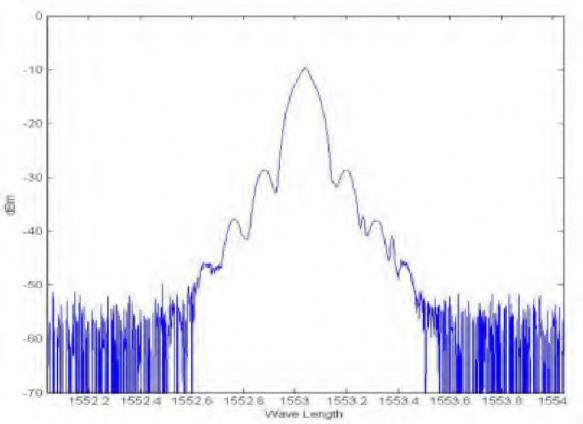
រូបភាពទី 4. វិសាលគម QPSK

រូបភាពទី 6. វិសាលគម CS-SSB
លក្ខណៈបច្ចេកទេស
| ប៉ារ៉ាម៉ែត្រ | នាទី | ប្រភេទ | អតិបរមា | ឯកតា |
| ប្រសិទ្ធភាពត្រួតពិនិត្យ | ||||
| ដៃ I, Q ត្រូវបានគ្រប់គ្រងនៅលើសូន្យ (អប្បបរមា)or កំពូល (អតិបរមា)ចំណុច | ||||
| សមាមាត្រនៃការផុតពូជ | MER1 | 50 | dB | |
| ដៃ P ត្រូវបានគ្រប់គ្រងនៅលើQ+(ការ៉េខាងស្តាំ)or Q-( ការ៉េខាងឆ្វេង)ចំណុច | ||||
| ភាពត្រឹមត្រូវនៅ Quad | −2 | +2 | សញ្ញាបត្រ2 | |
| ពេលវេលាស្ថេរភាព | 45 | 50 | 55 | s |
| អគ្គិសនី | ||||
| វ៉ុលថាមពលវិជ្ជមាន | +១៤.៥ | +១៥ | +១៥.៥ | V |
| ចរន្តថាមពលវិជ្ជមាន | 20 | 30 | mA | |
| វ៉ុលថាមពលអវិជ្ជមាន | -១៥.៥ | -១៥ | -១៤.៥ | V |
| ចរន្តថាមពលអវិជ្ជមាន | 8 | 15 | mA | |
| ជួរវ៉ុលទិន្នផលនៃ YI/YQ/XI/XQ | -១៤.៥ | +១៤.៥ | V | |
| ជួរវ៉ុលទិន្នផលរបស់ YP/XP | -១៣ | +១៣ | V | |
| អំព្លីទីតឌីធើរ | 1%Vπ | V | ||
| អុបទិក | ||||
| ថាមពលអុបទិកបញ្ចូល3 | -៣០ | -8 | ឌីប៊ីម | |
| រលកធាតុចូល | ១១០០ | ១៦៥០ | nm | |
1 MER សំដៅលើសមាមាត្រផុតពូជរបស់ម៉ូឌុលទ័រខាងក្នុង។ សមាមាត្រផុតពូជដែលសម្រេចបានជាធម្មតាគឺជាសមាមាត្រផុតពូជរបស់ម៉ូឌុលទ័រដែលបានបញ្ជាក់នៅក្នុងសន្លឹកទិន្នន័យម៉ូឌុលទ័រ។
2អនុញ្ញាតឱ្យVπ បង្ហាញពីវ៉ុលលំអៀងនៅ 180◦ និងVP បង្ហាញពីវ៉ុលលំអៀងដែលល្អបំផុតនៅចំណុច Quad ។
3សូមចំណាំថា ថាមពលអុបទិកបញ្ចូលមិនសំដៅទៅលើថាមពលអុបទិកនៅចំណុចប៊ីអាសដែលបានជ្រើសរើសនោះទេ។ វាគឺជាថាមពលអុបទិកអតិបរមាដែលឧបករណ៍កែប្រែអាចនាំចេញទៅឧបករណ៍បញ្ជានៅពេលដែលវ៉ុលប៊ីអាសមានចាប់ពី−Vπ ទៅ +Vπ .
ចំណុចប្រទាក់អ្នកប្រើប្រាស់
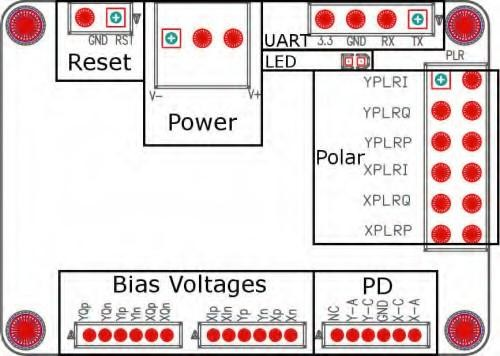
រូបភាពទី 5. ការផ្គុំ
| ក្រុម | ប្រតិបត្តិការ | ការពន្យល់ |
| សម្រាក | បញ្ចូលខ្សែភ្ជាប់ ហើយទាញចេញបន្ទាប់ពី 1 វិនាទី | កំណត់ឧបករណ៍បញ្ជាឡើងវិញ |
| ថាមពល | ប្រភពថាមពលសម្រាប់ឧបករណ៍បញ្ជាលំអៀង | វី- ភ្ជាប់អេឡិចត្រូតអវិជ្ជមាននៃការផ្គត់ផ្គង់ថាមពល |
| V+ ភ្ជាប់អេឡិចត្រូតវិជ្ជមាននៃការផ្គត់ផ្គង់ថាមពល | ||
| ច្រកកណ្តាលភ្ជាប់ជាមួយអេឡិចត្រូតដី | ||
| យូអេសធី | ដំណើរការឧបករណ៍បញ្ជាតាមរយៈ UART | ៣.៣: វ៉ុលយោង ៣.៣ វ៉ុល |
| GND: ដី | ||
| RX: ទទួលឧបករណ៍បញ្ជា | ||
| TX: ការបញ្ជូនរបស់ឧបករណ៍បញ្ជា | ||
| អំពូល LED | បើកជានិច្ច | ធ្វើការក្រោមស្ថានភាពស្ថិរភាព |
| បើក-បិទ ឬ បិទ-បើក រៀងរាល់ 0.2 វិនាទីម្តង | ដំណើរការទិន្នន័យ និងស្វែងរកចំណុចត្រួតពិនិត្យ | |
| បើក-បិទ ឬ បិទ-បើក រៀងរាល់ 1 វិនាទីម្តង | ថាមពលអុបទិកបញ្ចូលខ្សោយពេក | |
| បើក-បិទ ឬ បិទ-បើក រៀងរាល់ 3 វិនាទីម្តង | ថាមពលអុបទិកបញ្ចូលខ្លាំងពេក | |
| ប៉ូល1 | XPLRI: បញ្ចូល ឬទាញឧបករណ៍ភ្ជាប់ចេញ | គ្មានឧបករណ៍លោត៖ របៀបសូន្យ; ជាមួយឧបករណ៍លោត៖ របៀបកំពូល |
| XPLRQ: បញ្ចូល ឬទាញឧបករណ៍ភ្ជាប់ចេញ | គ្មានឧបករណ៍លោត៖ របៀបសូន្យ; ជាមួយឧបករណ៍លោត៖ របៀបកំពូល | |
| XPLRP: បញ្ចូល ឬទាញឧបករណ៍ភ្ជាប់ចេញ | គ្មានឧបករណ៍លោត៖ របៀប Q+; ជាមួយឧបករណ៍លោត៖ របៀប Q- | |
| YPLRI: បញ្ចូល ឬទាញឧបករណ៍ភ្ជាប់ចេញ | គ្មានឧបករណ៍លោត៖ របៀបសូន្យ; ជាមួយឧបករណ៍លោត៖ របៀបកំពូល | |
| YPLRQ: បញ្ចូល ឬទាញឧបករណ៍លោតចេញ | គ្មានឧបករណ៍លោត៖ របៀបសូន្យ; ជាមួយឧបករណ៍លោត៖ របៀបកំពូល | |
| YPLRP: បញ្ចូល ឬទាញឧបករណ៍ភ្ជាប់ចេញ | គ្មានឧបករណ៍លោត៖ របៀប Q+; ជាមួយឧបករណ៍លោត៖ របៀប Q- | |
| វ៉ុលលំអៀង | YQp, YQn: លំអៀងសម្រាប់ប៉ូលនីយកម្ម Y ដៃ Q | YQp: ផ្នែកវិជ្ជមាន; YQn: ផ្នែកអវិជ្ជមាន ឬដី |
| YIp, YIn: ភាពលំអៀងសម្រាប់ប៉ូលនីយកម្ម Y ដៃ I | YIp: ផ្នែកវិជ្ជមាន; YIn: ផ្នែកអវិជ្ជមាន ឬដី | |
| XQp, XQn: លំអៀងសម្រាប់ប៉ូលនីយកម្ម X ដៃ Q | XQp: ផ្នែកវិជ្ជមាន; XQn: ផ្នែកអវិជ្ជមាន ឬដី | |
| XIp, XIn: ភាពលំអៀងសម្រាប់ប៉ូលនីយកម្ម X I ដៃ | XIp: ផ្នែកវិជ្ជមាន; XIn: ផ្នែកអវិជ្ជមាន ឬដី | |
| YPp, YPn: ភាពលំអៀងសម្រាប់ប៉ូលនីយកម្ម Y ដៃ P | YPp: ផ្នែកវិជ្ជមាន; YPn: ផ្នែកអវិជ្ជមាន ឬដី | |
| XPp, XPn: លំអៀងសម្រាប់ប៉ូលនីយកម្ម X ដៃ P | XPp: ផ្នែកវិជ្ជមាន; XPn: ផ្នែកអវិជ្ជមាន ឬដី |
1 ប៉ូលអាស្រ័យលើសញ្ញា RF របស់ប្រព័ន្ធ។ នៅពេលដែលមិនមានសញ្ញា RF នៅក្នុងប្រព័ន្ធ ប៉ូលគួរតែវិជ្ជមាន។ នៅពេលដែលសញ្ញា RF មានទំហំធំជាងកម្រិតជាក់លាក់មួយ ប៉ូលនឹងផ្លាស់ប្តូរពីវិជ្ជមានទៅជាអវិជ្ជមាន។ នៅពេលនេះ ចំណុចសូន្យ និងចំណុចកំពូលនឹងប្តូរជាមួយគ្នា។ ចំណុច Q+ និងចំណុច Q- ក៏នឹងប្តូរជាមួយគ្នាដែរ។ កុងតាក់ប៉ូលអនុញ្ញាតឱ្យអ្នកប្រើប្រាស់ផ្លាស់ប្តូរ
ប៉ូលដោយផ្ទាល់ដោយមិនផ្លាស់ប្តូរចំណុចប្រតិបត្តិការ។
| ក្រុម | ប្រតិបត្តិការ | ការពន្យល់ |
| PD1 | NC: មិនបានភ្ជាប់ | |
| YA: ហ្វូតូឌីយ៉ូត Y-ប៉ូឡារីស្យុង អាណូត | YA និង YC: មតិប្រតិកម្មប៉ូឡារីស្យុង Y | |
| YC: ហ្វូតូឌីយ៉ូត Y-ប៉ូឡារីស្យុង កាតូត | ||
| GND: ដី | ||
| XC: ហ្វូតូឌីយ៉ូតប៉ូឡារីសាស្យុង X កាតូត | XA និង XC: មតិប្រតិកម្មពន្លឺប៉ូឡារីស្យុង X | |
| XA: ឌីយ៉ូតហ្វូតូប៉ូឡារីស្យុង X អាណូត |
1 មានតែជម្រើសមួយប៉ុណ្ណោះដែលត្រូវជ្រើសរើសរវាងការប្រើប្រាស់ហ្វូតូឌីយ៉ូដឧបករណ៍បញ្ជា ឬការប្រើប្រាស់ហ្វូតូឌីយ៉ូដម៉ូឌុល។ វាត្រូវបានណែនាំអោយប្រើហ្វូតូឌីយ៉ូដឧបករណ៍បញ្ជាសម្រាប់ការពិសោធន៍មន្ទីរពិសោធន៍ដោយសារហេតុផលពីរយ៉ាង។ ទីមួយ ហ្វូតូឌីយ៉ូដឧបករណ៍បញ្ជាបានធានានូវគុណភាព។ ទីពីរ វាកាន់តែងាយស្រួលក្នុងការកែតម្រូវអាំងតង់ស៊ីតេពន្លឺចូល។ ប្រសិនបើប្រើហ្វូតូឌីយ៉ូដខាងក្នុងរបស់ម៉ូឌុល សូមប្រាកដថាចរន្តទិន្នផលរបស់ហ្វូតូឌីយ៉ូដគឺសមាមាត្រយ៉ាងតឹងរ៉ឹងទៅនឹងថាមពលចូល។
ក្រុមហ៊ុន Rofea Optoelectronics ផ្តល់ជូននូវផលិតផលពាណិជ្ជកម្មជាច្រើនប្រភេទ ដូចជា ឧបករណ៍កែប្រែអេឡិចត្រូអុបទិក ឧបករណ៍កែប្រែដំណាក់កាល ឧបករណ៍កែប្រែអាំងតង់ស៊ីតេ ឧបករណ៍ចាប់ពន្លឺ ប្រភពពន្លឺឡាស៊ែរ ឡាស៊ែរ DFB ឧបករណ៍ពង្រីកពន្លឺអុបទិក EDFA ឡាស៊ែរ SLD ឧបករណ៍កែប្រែ QPSK ឡាស៊ែរជីពចរ ឧបករណ៍ចាប់ពន្លឺ ឧបករណ៍ចាប់ពន្លឺដែលមានតុល្យភាព ឧបករណ៍បញ្ជាឡាស៊ែរ ឧបករណ៍ពង្រីកពន្លឺសរសៃអុបទិក ម៉ែត្រថាមពលអុបទិក ឡាស៊ែរប្រ៊ដប៊ែន ឡាស៊ែរដែលអាចលៃតម្រូវបាន ឧបករណ៍ចាប់ពន្លឺអុបទិក ឧបករណ៍បញ្ជាឌីយ៉ូដឡាស៊ែរ ឧបករណ៍ពង្រីកពន្លឺសរសៃ។ យើងក៏ផ្តល់ជូននូវឧបករណ៍កែប្រែជាក់លាក់ជាច្រើនសម្រាប់ការប្ដូរតាមបំណងផងដែរ ដូចជា ឧបករណ៍កែប្រែដំណាក់កាលអារេ 1*4 Vpi ទាបបំផុត និងឧបករណ៍កែប្រែសមាមាត្រផុតពូជខ្ពស់បំផុត ដែលភាគច្រើនប្រើប្រាស់នៅក្នុងសាកលវិទ្យាល័យ និងវិទ្យាស្ថាន។
សង្ឃឹមថាផលិតផលរបស់យើងនឹងមានប្រយោជន៍ដល់អ្នក និងការស្រាវជ្រាវរបស់អ្នក។


